
导语:眼下,无人驾驶是一个热门话题,有人宣称2030年满世界道路上行驶的都是无人驾驶汽车。那不禁问一个问题,无人驾驶汽车还需要进驾校学习吗?(来源:汽研社)
 关注公众号“ 有腔有调”,查看更多精彩原创内容!
关注公众号“ 有腔有调”,查看更多精彩原创内容!这让我想起多年前有一个段子:3000年时,外星人抵达地球考察,很快发回了一份考察报告,说地球有无数金属甲虫,这种甲虫腹中有一种寄生动物,叫人类。那就是所有汽车无人驾驶的场景。在无人驾驶的汽车里,除了睡觉、玩手机,还能干点什么呢?
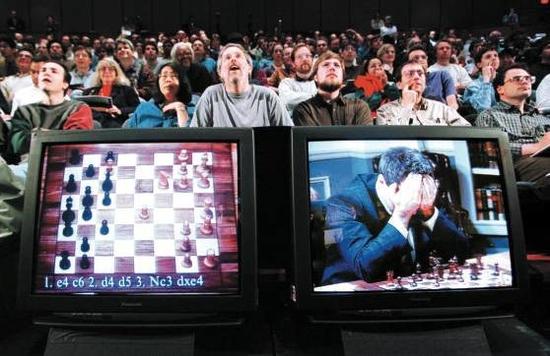
今年3月,谷歌旗下Deepmind 公司开发的人工智能“阿尔法狗”(AlphaGo)以4比1战胜韩国围棋冠军李世石,又引起了对人工智能的热议。
机器与人类的争斗是美国好莱坞大片的常青主题。那么机器是否真有可能取代人类?

人文经济学会特约研究员黄文政认为:即使人工智能最终全面超越人类,机器代替人类从事所有的工作,那也并不意味着人类就会消亡。人类演化的目的是生存,而不是工作。人类可能因为饥荒而死亡,却不会因为无需工作而活不下去。
那么机器是否会完全脱离人类的控制而最终消灭人类呢?按前所述,机器目标的单一化和抽象化相当于让机器拥有“自我意识”,自动将抽象目标分解成具体、短期的子目标则可以通过嵌入“情绪”机制来实现,而随机性行为则体现了机器的“自由意志”。具有这些特征的机器比较容易脱离人类的控制,而繁衍机制的实现可能导致机器与人类争夺能源。

但从乐观的角度来看,如果机器的智能没有超越人类,机器也就无力消灭人类。如果机器达到人类的智能水平,由于进化的速度会远快于人类,机器不会长期停留在人类的水平,而会很快就会大幅超越人类的智能。到那一步,人类并不会构成对机器的威胁,因此机器也没有必要消灭人类。更现实的是,机器全面超越人类的前景现在依然十分遥远,而且未来人工智能的重大突破都会引起人类的警觉,给人类足够的余地来应对。因此,人类目前真正需要担心的不是被机器消灭,而是自身繁衍是否可持续。
1997年,IBM的“深蓝”计算机首次击败国际象棋世界冠军卡斯帕罗夫,成为人工智能战胜人类棋手的第一个标志性事件。此后近20年间,计算机在许多智力游戏中都击败过人类。但在围棋领域,直到“阿尔法狗”诞生才首次战胜人类的围棋冠军。
中国自动化协会副理事长、秘书长王飞跃说:“围棋的可能性太多。围棋每一步的可能下法非常多,棋手起手时就有19×19=361种落子选择。一局150回合的围棋可能出现的局面多达10170种。围棋的规律太微妙,在某种程度上落子选择依靠的是经验积累而形成的直觉。此外,在围棋的棋局中,计算机很难分辨当下棋局的优势方和弱势方。因此,围棋挑战被称作人工智能的‘阿波罗计划’。”
据报道,阿尔法狗是通过蒙特卡洛树搜索算法和两个深度神经网络来完成下棋。有专家曾通俗地解释:假如篮子里有1000个苹果,让你每次闭着眼睛找一个最大的,可以不限制挑选次数。于是,你可以闭着眼随机拿了一个,然后再随机拿一个与第一个比,留下大的,再随机拿一个,与前次留下的比较,又可以留下大的。循环往复这样,拿的次数越多,挑出最大苹果的可能性也就越大,但除非你把1000个苹果都挑一遍,否则你无法肯定最终挑出来的就是最大的一个。这就是蒙特卡洛搜索,它被广泛用于科学和工程研究的算法仿真中。

中国科学院自动化研究所研究员易建强说,“阿尔法狗利用深度学习的方法,降低了搜索树的复杂性,搜索空间得到有效降低。比如,策略网络负责指挥计算机搜索出更像人类高手该落子的位置,而估值网络负责指挥计算机搜索出后续更有可能获胜的一个落子位置。”
今年3月,全国政协十二届四次会议期间,李书福、李彦宏都带来了建议尽快修订和完善无人驾驶相关的法律法规的提案。表面上,两个人的提案似乎“撞车”,但是两个人的自动驾驶概念是完全不同的。
李书福在去年乌镇举行的第二届世界互联网大会上就表示,传统车企和互联网企业对智能汽车的定位有所不同。传统车企更加倾向于以人工驾驶为主导、自动驾驶为辅助;而互联网企业所推崇的无人驾驶更加倾向于以车辆本身为主导的自动驾驶汽车。

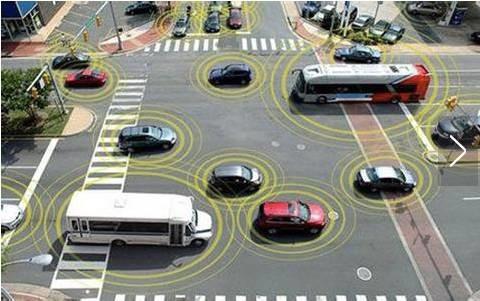
无人驾驶的发展目前有着两条路线,一条是传统汽车主机厂商走的“四个阶段渐进”路线。然而,要想达到完全的无人驾驶,仅仅以“四个阶段”的计算能力和软件难度基本不可能,最多只是短期内给汽车增加一些卖点。
另一条路线则是直奔主题的“互联网企业”路线。以百度和谷歌为代表,采用目前价格还极其昂贵的激光雷达作为主要传感器,其采集到的信息以高水平人工智能技术来识别判断。在这条路线上,谷歌已接近实用,百度也在国内完成了城市、环路及高速道路混合路况下的全自动驾驶测试。
智能驾驶系统的算法怎么办?是用摸最大苹果的办法吗?最近谷歌的自动驾驶车在加州山景城以2英里/小时的全自动驾驶模式行进时,不慎与一辆车速15英里/小时的公交车发生了碰撞(这已经不是谷歌自动驾驶汽车第一次在路上遭遇车祸)。事后谷歌方面给出的说明是,当时自动驾驶汽车认为巴士将减速等待,但巴士车并没有那样做。在现实的行车环境中,这种基于“对方行为推测”的现象屡屡发生,因此引发的车祸也并不少见,谷歌也认为这是一个“关于协商的典型案例”。特斯拉的自动驾驶汽车也出过类似的车祸。其实,这与下棋很相似,需要正确判断对方行为意图,才能保证自己性的的正确。道路交通所遇到的情况实在是太复杂了,路径导航、信号识别、车道保持、变道、泊车,这些对于自动驾驶来说都是小儿科的东西,旁边的驾驶员在动什么心思?那个老太太过街看不看红灯?这比围棋难多了,是蒙特卡洛树搜索算法无法解决的。

专家们表示,阿尔法狗成功的秘诀就是让计算机知道如何完成目标并通过经验来提高,而不是每项任务都通过手写指令来完成。这个秘诀实际上就是深度学习,是指多层的人工神经网络和训练它的方法,简单通俗地讲就是指计算机通过深度神经网络,模拟人脑的机制来学习、判断、决策。
根据《自然》期刊论文的介绍,阿尔法狗使用了两种深度学习神经网络,即“策略网络”和“价值网络”。深度学习神经网络是近年人工智能领域的热门,在笔迹识别、自动驾驶、自然语言理解、图像和语音处理等方面都极为成功。在人工智能领域,神经网络是一种模拟生物神经系统的模型,由许多单向连接的神经元组成,可将输入信号转换为输出信号;具体如何转换取决于链接神经元的各种参数。神经网络的学习就是根据训练样本不断更新参数的过程。
 论文描述了阿尔法狗的两种学习方法:
论文描述了阿尔法狗的两种学习方法:“监督训练”:类似于专家手把手训练“战术大脑”。训练样本是3000多万个棋局和专家的相应棋步,训练目标是让“战术大脑”选择的步子尽量接近专家的棋步。“策略网络”的13层结构便于将棋局表达成具有各种抽象概念之间的关系,能较好地模拟专家的思维。由于搜索空间中可能性棋局太多,“策略网络”只能将棋局信息压缩到一个较小的表达空间上,而这个空间未必足以充分反映棋局的各种细节。
“强化训练”:类似于让经过了“监督学习”后的初学者之间相互对弈来提高棋艺,即让“策略网络”自我对弈来改进“战术大脑”。如果说“监督学习”的目标是让“战术大脑”下得尽量像专家,那“强化学习”的目标则是不断提升“战术大脑”在对弈中的赢棋概率。在这种学习过程中,那些从“监督学习”中获得的有助于在实战中赢棋的思维倾向得到强化。
所以结论是:无人驾驶汽车还是需要进机器人驾校学习,并上路实习。